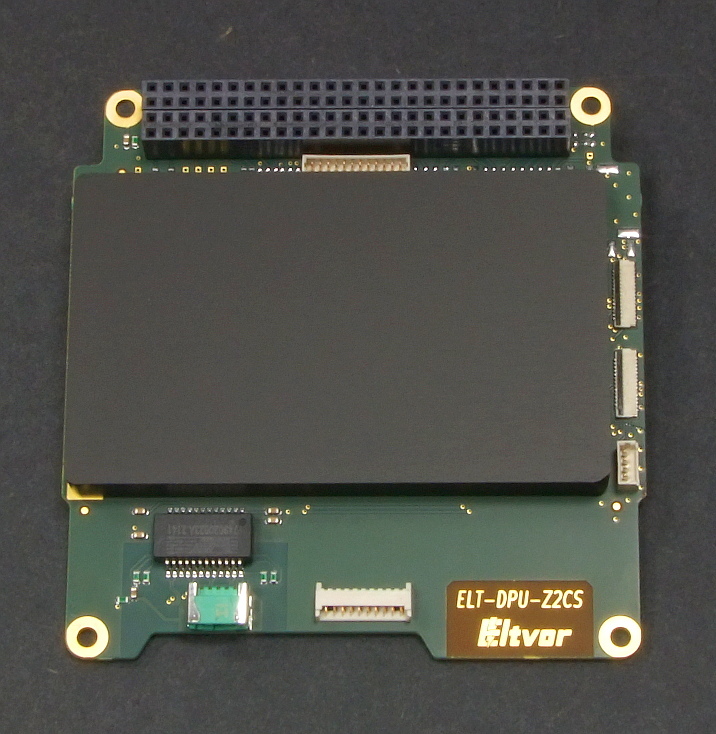
ELT-DPU-Z2CS
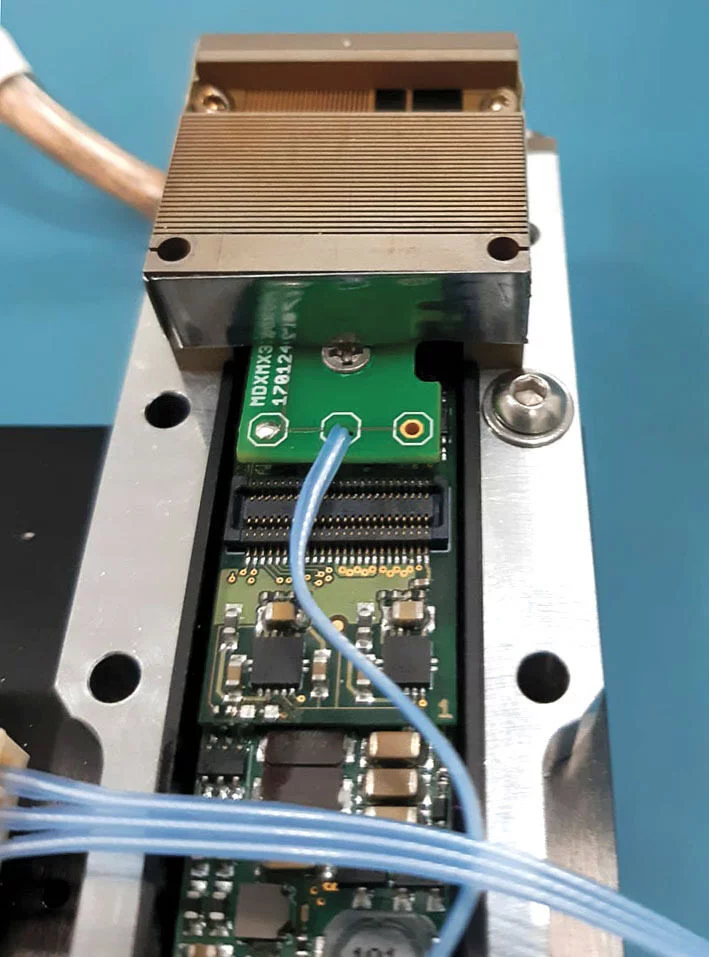
Eltvor's CubeSat-compatible OBC/DPU originating from our successful mission of dual camera based on VCVS2 DPU. The board contains Zynq 7k CPU+FPGA SoC, connectivity to platform bus is via CAN, RS485 and 1000BaseTx Ethernet. (I2C is populated as well, but not recommended.) Other connectivity includes USB host port. Power consumption is around 1W. The DPU includes 4GB of eMMC non-volatile storage.
The DPU may directly connect 1 or 2 camera modules of our design, which was the original mission. In case of interest, Eltvor has these cameras ready, B&W and RGB (Bayer) versions, 1.3Mpix, 13eRMS readout noise, 10000e well capacity.
Please see attached User Guide of the ELT-DPU-Z2CS DPU.
The equipment offered:
-
ELT-DPU-Z2CS DPU
-
VCAM1M3-BW (B&W camera)
-
VCAM1M3-RGB (RGB camera)
-
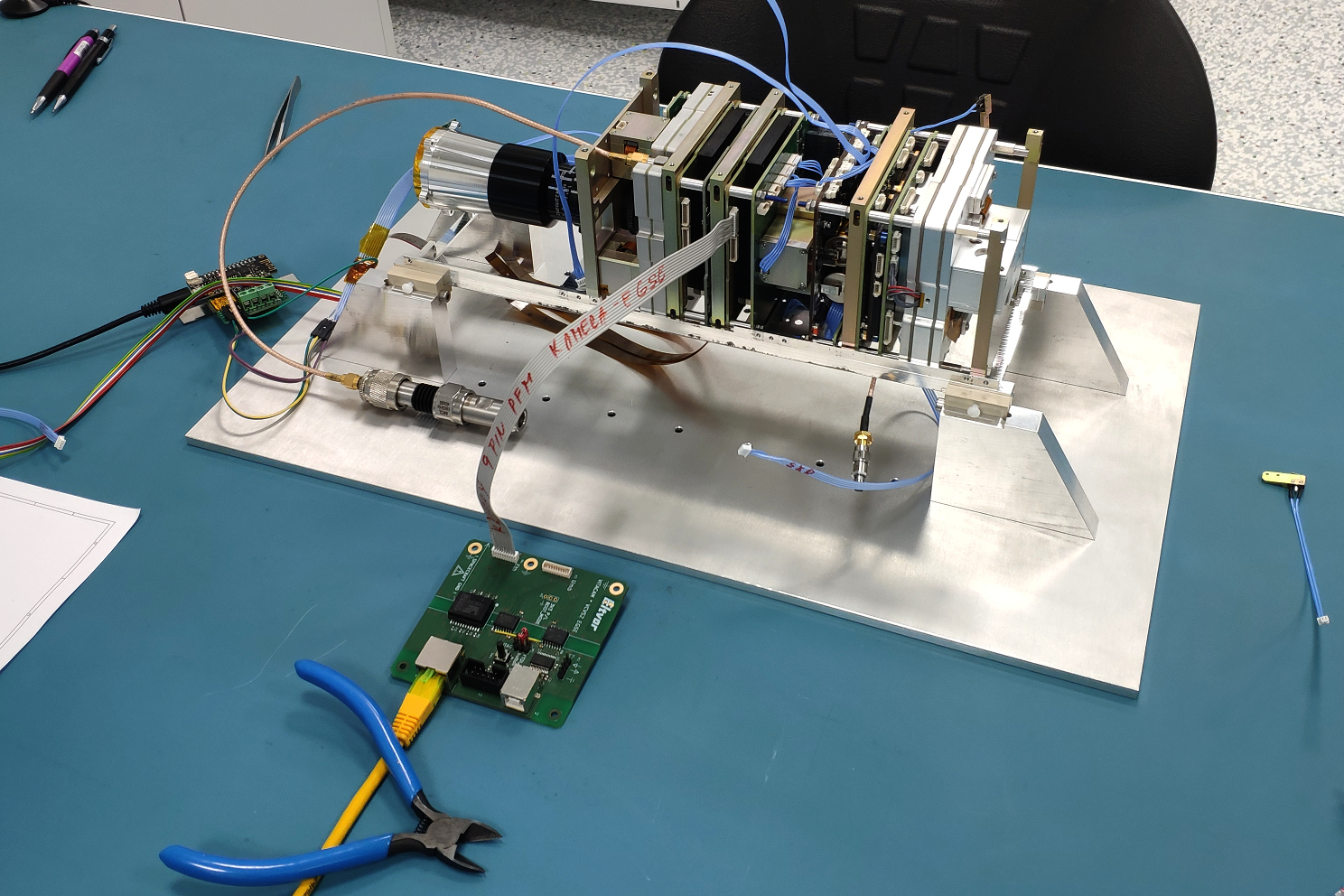
ELT-DPU-Z2CS-EGSE (EGSE providing USB-UART console, Ethernet and JTAG)
The development environment for ELT-DPU-Z2CS is standard ARM Linux. If camera option is selected, FPGA firmware is delivered including a C library and a standalone Linux executable which is able to shoot pictures in 1.3Mpix * 10b quality.
The DPU as well as the camera modules do have a flight heritage (photographing right now at 520km altitude), vibration & shock to Falcon-9 + ISIPOD profile, TID >=25krad (3 samples), T-vac.
Eltvor's VCVS2 participates on another independently operated instrument on board of VZLUSAT-2: Gamma camera with matrix detector. The physics package as well as application SW was developed by companies Rigaku and AdvaCam, while the on-board computer and OS infrastructure was provided by Eltvor.
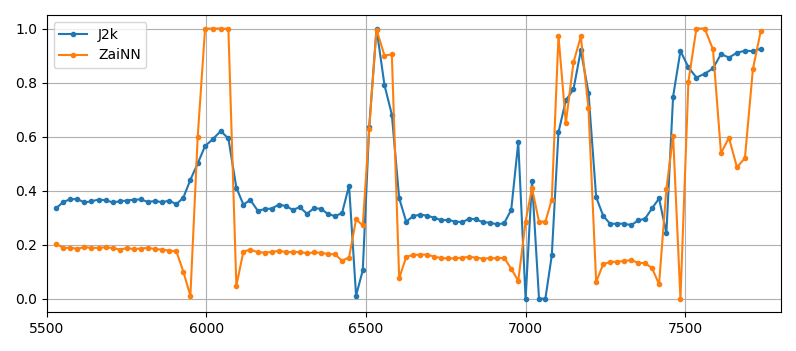
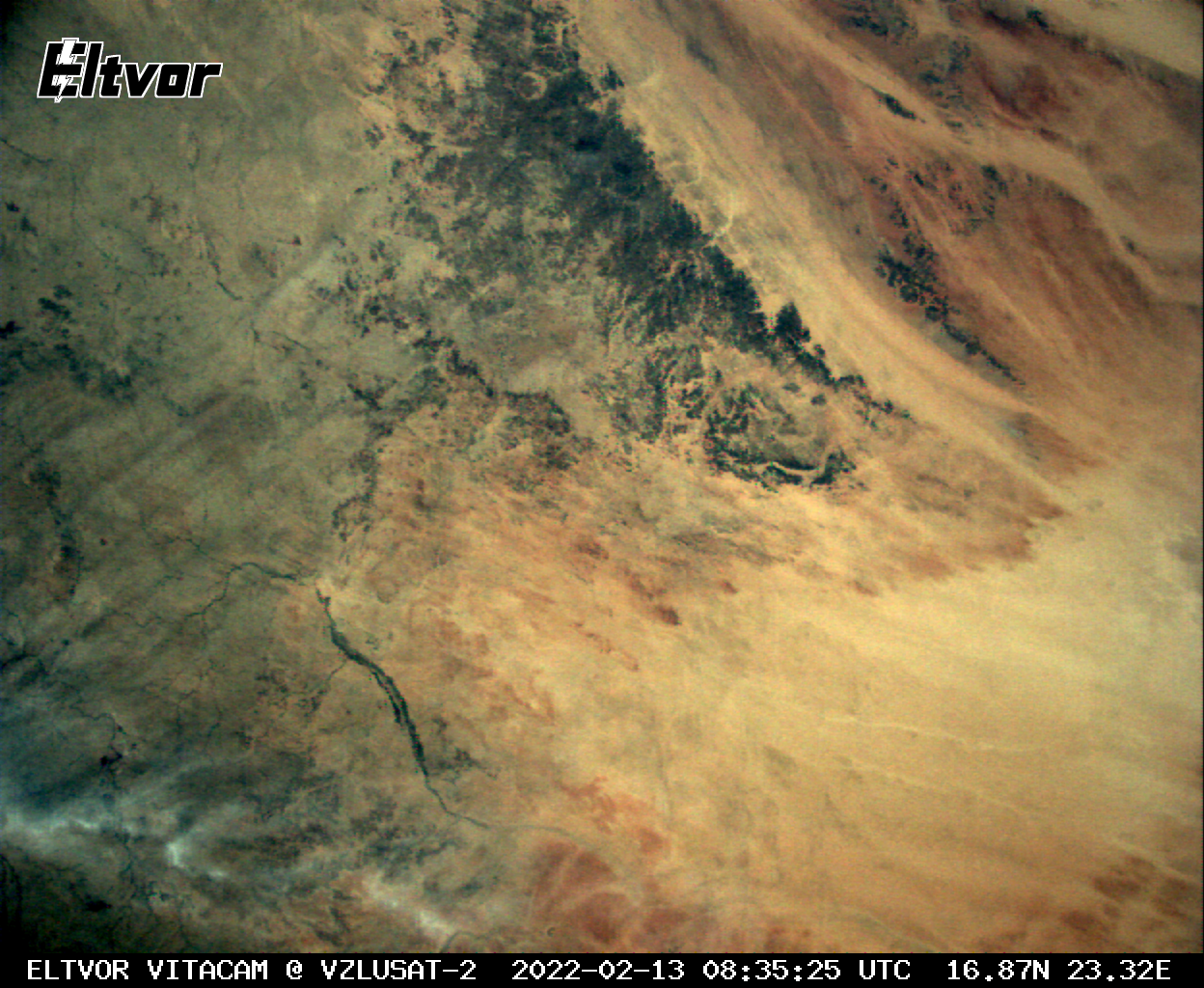
A group of young entrepreneurs of Zaitra startup contacted Eltvor with an interest to leverage TRL for their neural network based classifier of Earth images. Their original intent was to get Eltvor's Vitacam computer on a loan and to run some dummy tests. Instead, Eltvor proposed and later managed to upgrade its Vitacam in-orbit, and to run the neural network on Eltvor's computer in flight.
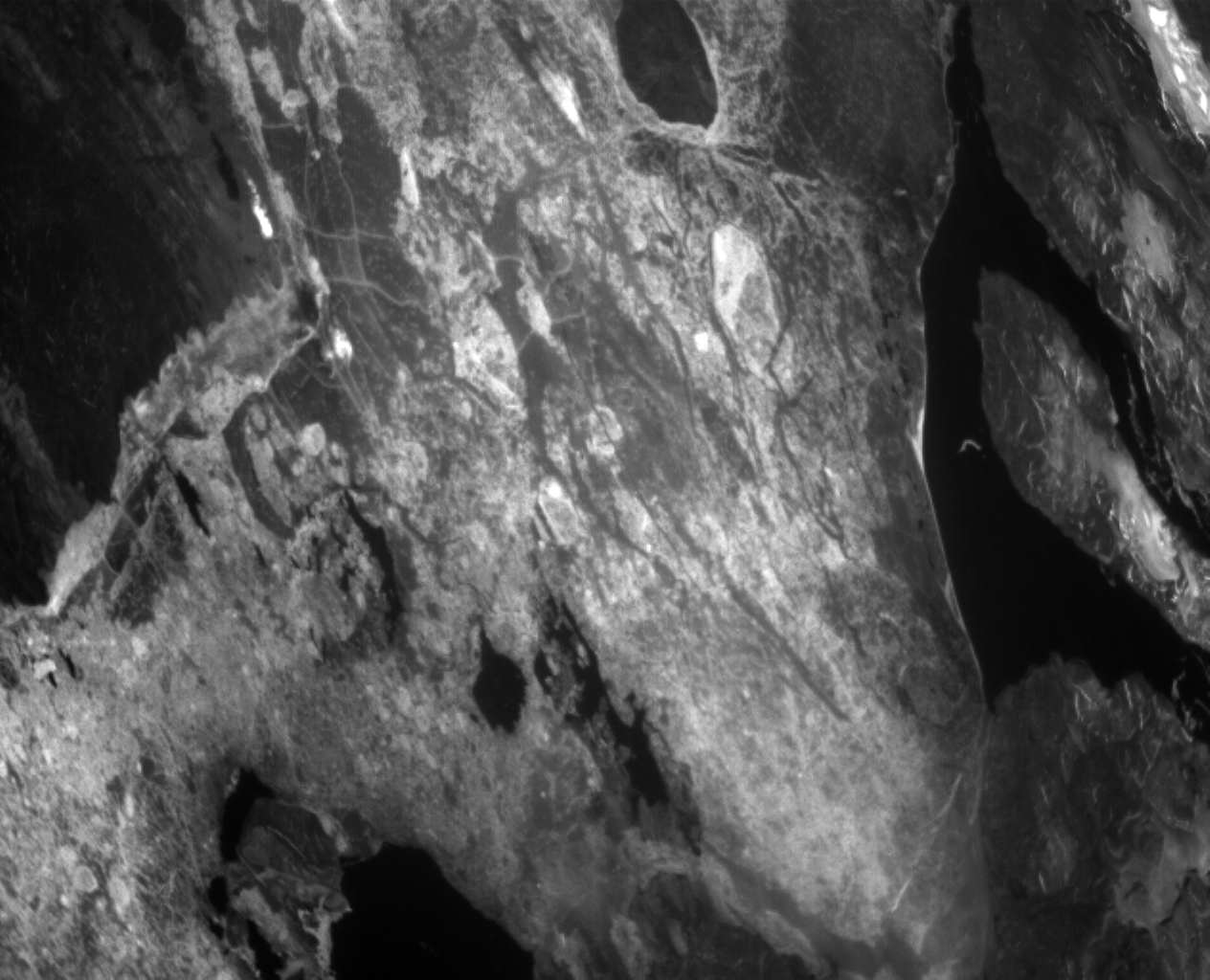
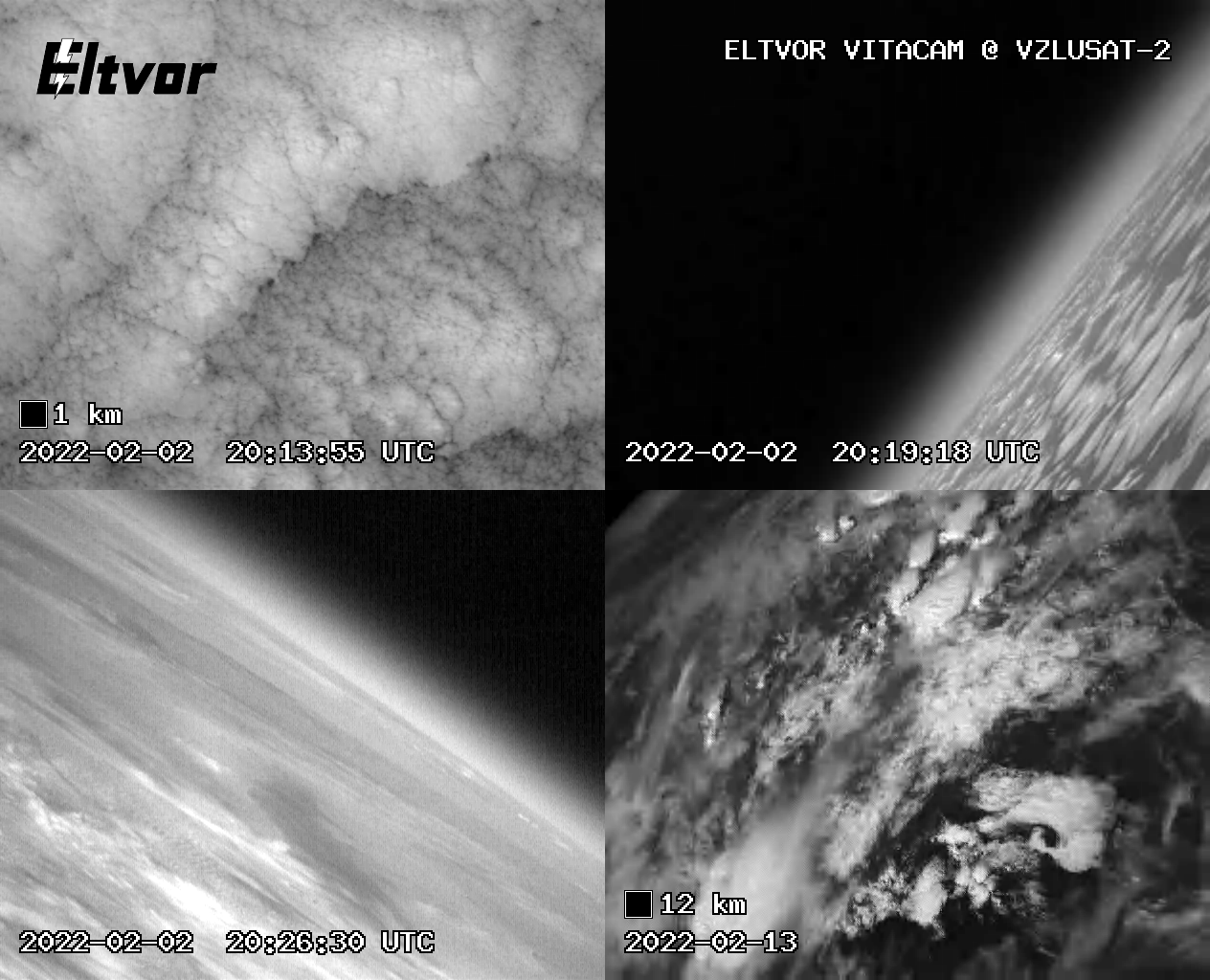
The SW upgrade went well, and the neural classifier was run alongside with Eltvor's original automated image quality classifier. The plot below shows the score calculated by Zaitra's neural network and by Eltvor's original SW, and as an example one of the nice photos taken during this event, depicting an ice field between Greenland and Canada.
In flight, we have successfully performed SW updates via CAN, JPEG2000 compression, automated image scoring and exposure control etc.